

https://doi.org/10.3390/polym15030718
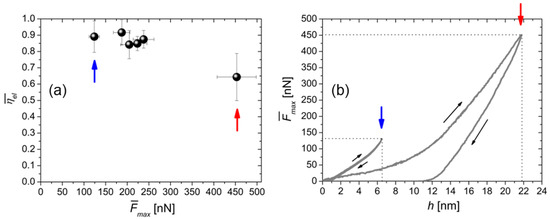
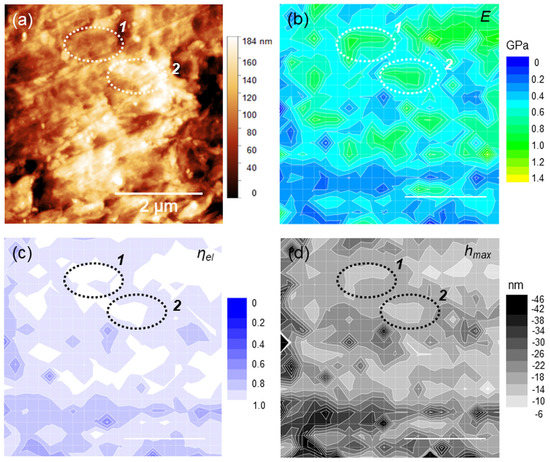
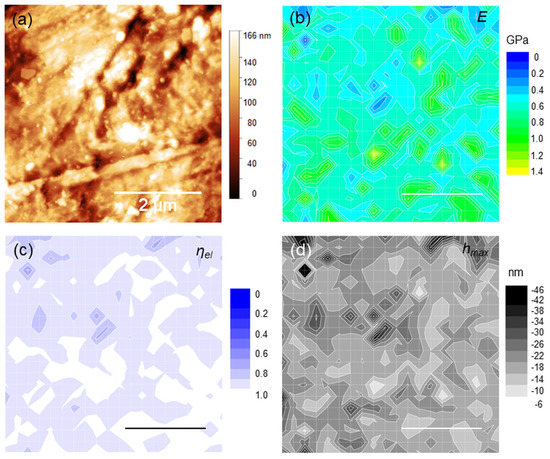
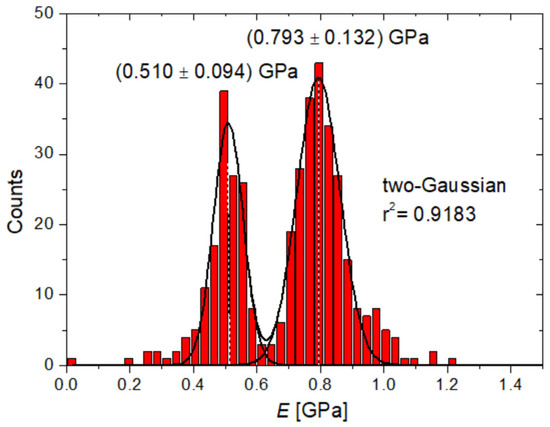
“Detecting subtle changes of surface stiffness at spatial scales and forces relevant to biological processes is crucial for the characterization of biopolymer systems in view of chemical and/or physical surface modification aimed at improving bioactivity and/or mechanical strength. Here, a standard atomic force microscopy setup is operated in nanoindentation mode to quantitatively mapping the near-surface elasticity of semicrystalline polyether ether ketone (PEEK) at room temperature. Remarkably, two localized distributions of moduli at about 0.6 and 0.9 GPa are observed below the plastic threshold of the polymer, at indentation loads in the range of 120–450 nN. This finding is ascribed to the localization of the amorphous and crystalline phases on the free surface of the polymer, detected at an unprecedented level of detail. Our study provides insights to quantitatively characterize complex biopolymer systems on the nanoscale and to guide the optimal design of micro- and nanostructures for advanced biomedical applications.”
”
”
”
2.1. Samples, AFM Setup and Calibration
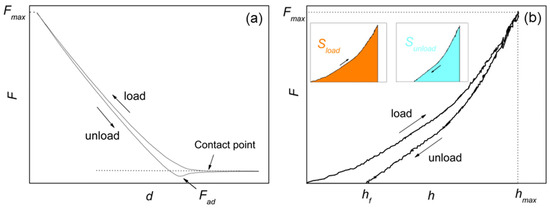
2.2. Indentation Modulus Calculation
2.3. Data Processing and Analysis
3. Results
3.1. Checking the Elastic Response of the Surface
3.2. Force-Mapping Results
“